科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:www.637617.com
機械手控制的要素包括工作順序、到達位置、動作時間、運動速度、加減速度等。機械手的控制分為點位控制和連續軌跡控制兩種
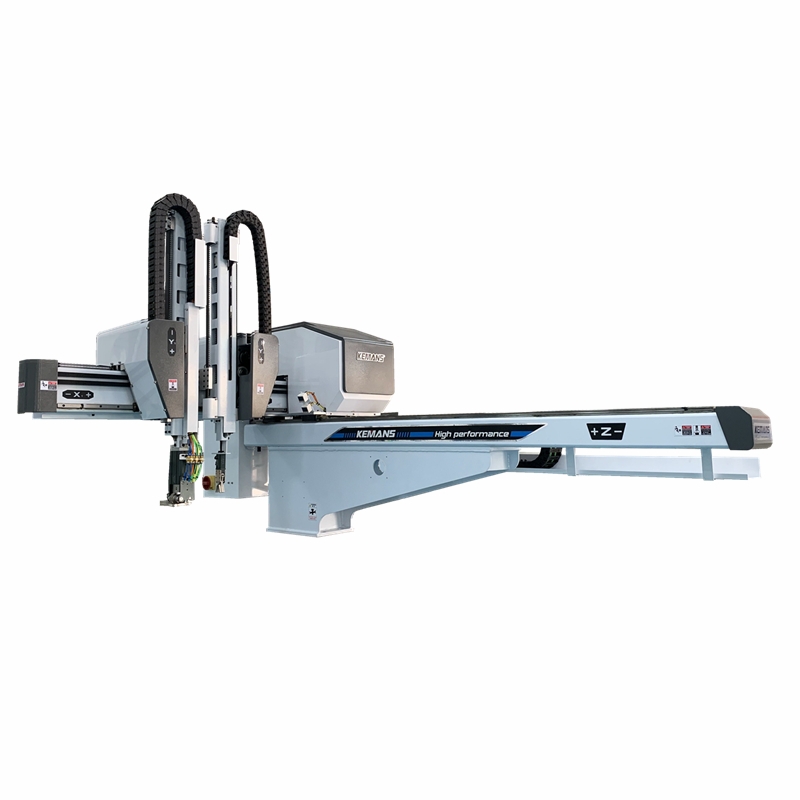
在正常出產時由五軸機械手來取出制品,注塑機周期固定,制品穩定性佳,使質量有確保。五軸機械手進步工作效率,降低人工成本。有五軸機械手幫助后,出產技術人員能夠集中精力在其他操作上,促進管理良性化。

五軸伺服機械手結構,要用于冷流道三板模注塑自動化系統中。 兩個伺服手臂中主臂擔任制品的取出,也能夠用在埋鑲件系統中鑲件埋入并制品取出;副臂則擔任撿水口。
機械手進行工作程序的存儲方式有分離存儲和集中存儲兩種。分離存儲是將各種控制因素的信息分別存儲于兩種以上的存儲裝置中,如順序信息存儲于插銷板、凸輪轉鼓、穿孔帶內;位置信息存儲于時間繼電器、定速回轉鼓等;集中存儲是將各種控制因素的信息全部存儲于一種存儲裝置內,如磁帶、磁鼓等。這種方式使用于順序、位置、時間、速度等需要同時控制的場合,即連續控制的情況下使用。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長