科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:www.637617.com
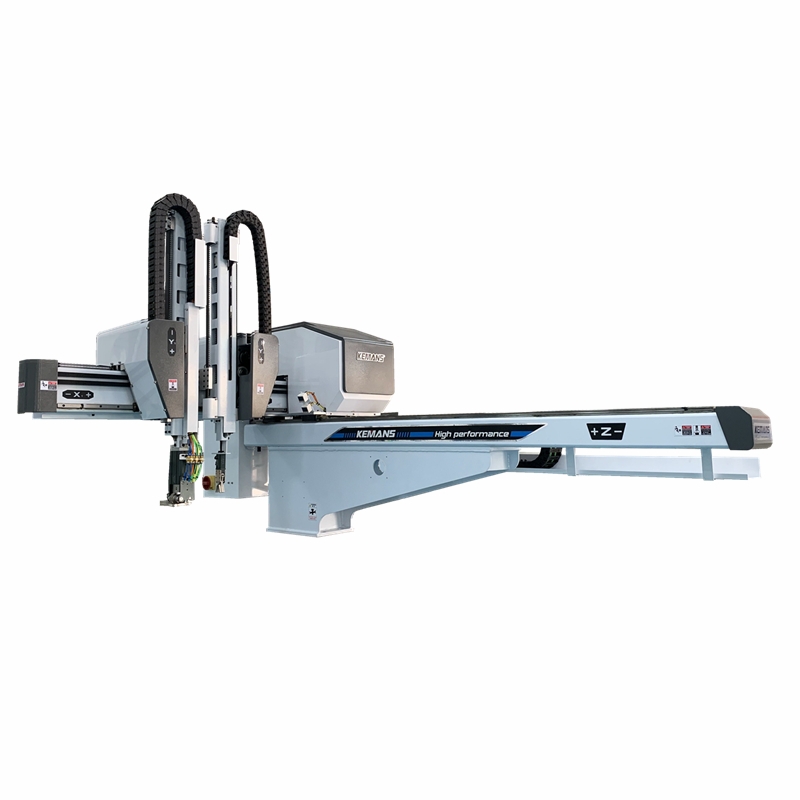
伺服機械手技能特征
伺服機械手是用于一些職業的產品出產中的,尤其是關于一些精密產品的出產,更是需求使用到這些機械手進行出產,機器的使用完結了人力所制作不了的事情,為社會的前進貢獻了許多的力氣。機械手由于不同的出產需求而制作出了各種各樣的機械手產品,用途和功用都是有所區別的。
伺服機械手在不同的機械設備其組成的結構是不一樣的,在各個職業的出產傍邊,機械設備的使用是比較重要的,機器和人力的結合能夠使得出產職業的出產達到比較良好的情況,進步企業的出產功率,獲得更加良好的經濟效益。
一套完好的搬運機械手裝備主要由三部分組成,平衡吊主機、抓取夾具或機械手及設備結構;機械手主機是完結物料或工件在空中無重力化起浮情況的主體裝;機械手則是完結工件抓取,并完結用戶相應搬運和安裝要求的設備;設備結構則是依據用戶服務區域及現場情況要求以支撐整套設備的組織。
伺服機械手作為現代工業的首選擇機器人,其功用可操控性是每個工業企業首先看中的重中之重,優先考慮的是要比人的勞作能力和協調性怎么,那么也便是這些長處替代了許多工作中的人類勞作,讓其功用得到了非常深度的認可。

伺服機械手技能特征:
1、產業化部件:老練的產業化出產部件可提供良好的穩定性和可靠性。
2、模塊化結構 :很多削減非標規劃與制作,大極限的削減規劃與施行的風險。
3、優異的驅動與控制系統,具有標準機械手的通用功用,如示教等。
4、自動化集料與碼垛:完結全工序的自動銜接,可完結無人工干預的全自動運行。
伺服機械手主要由手部和運動組織組成。手部是用來抓持工件(或工具)的部件,依據被抓持物件的形狀、尺度、分量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。運動組織,使手部完結各種滾動(搖擺)、移動或復合運動來完結規定的動作,改動被抓持物件的位置和姿勢。運動組織的升降、伸縮、旋轉等獨立運動方式,稱為機械手的自由度 。為了抓取空間中任意位置和方位的物體,需有6個自由度。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長