科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:www.637617.com
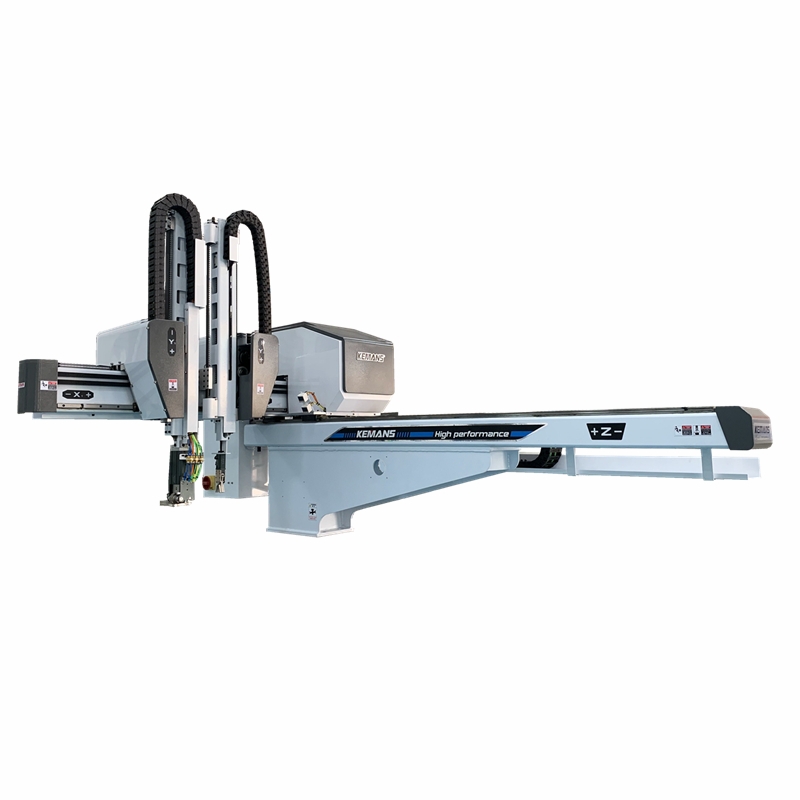
現在常見機械手是工業生產中常用的進行水平/筆直位移的機械設備,它的動作由氣缸驅動,氣缸又由相應的電磁閥操控。下面介紹下伺服機械手的組成部分和運動狀況。
伺服機械手主要由起固定支撐作用的機架、機械臂和氣爪三部分組成。驅動榜首肩關節的運動有2根氣動肌肉組成,機架臂有4根氣動肌肉組成,大臂上設備有4根氣動肌肉,小臂上設備有4根氣動肌肉。
機械手的分類:
1.按驅動方法可分為液壓式、氣動式、電動式、機械式機械手;
2.按適用范圍可分為專用機械手和通用機械手兩種;
3.按運動軌道操控方法可分為點位操控和接連軌道操控機械手等。
伺服機械手可以完成4個自由度的運動,其各自的自由度的驅動悉數由氣動肌肉來完成。最前端的氣爪抓取物品,經過氣動肌肉的驅動完成各自關節的滾動,使物品在空間上運動,依據合理的操控,終究完成機械手的動作要求。

專用機械手的組成
專用機械手的組成一般由履行體系、驅動體系、操控體系等組成。
1、履行體系:機械手抓取或釋放制品、完成各種操作運動的體系,由臂部、腕部和手部等部件組成。
2、驅動體系:為履行體系的各部件供給動力的體系,有氣動、電動及機械等方法。目前比較常用的是氣動和電動兩種方法,氣動式速度快、結構簡略、本錢低、有較高的重復定位精度;電動式速度快、可完成接連操控、定位精度高、但本錢較高。
3、操控體系:經過對驅動體系進行操控,使履行體系依照預定的作業要求進行操作,并對履行體系的動作進行修正的體系,一般包含方位檢測設備和程序操控部分,一般采用點位操控和接連軌道操控兩種方法。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長