科曼斯-注塑行業(yè)自動化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業(yè)自動化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯(lián)系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮(zhèn)冼沙五坊祥福路3號
網(wǎng)址:www.637617.com
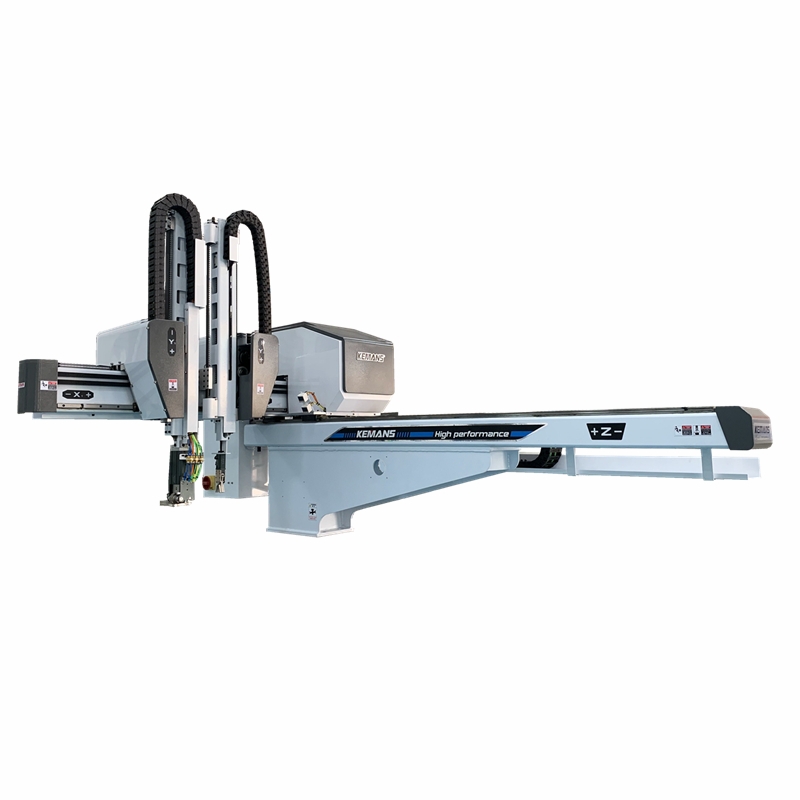
一、手臂應(yīng)承載能力大、剛性好、自重輕
手臂的剛性直接影響到手臂抓取工件時動作的平穩(wěn)性、運動的速度和定位精度。如剛性差則會引起手臂在垂直平面內(nèi)的彎曲變形和水平面內(nèi)側(cè)向扭轉(zhuǎn)變形,手臂就要產(chǎn)生振動,或動作時工件卡死無法工作。為此,手臂一般都采用剛性較好的導(dǎo)向桿來加大手臂的剛度,各支承、連接件的剛性也要有一定的要求,以保證能承受所需要的驅(qū)動力。
二、手臂的運動速度要適當(dāng),慣性要小
機械手的運動速度一般是根據(jù)產(chǎn)品的生產(chǎn)節(jié)拍要求來決定的,但不宜盲目追求高速度。
手臂由靜止?fàn)顟B(tài)達到正常的運動速度為啟動,由常速減到停止不動為制動,速度的變化過程為速度特性曲線。
手臂自重輕,其啟動和停止的平穩(wěn)性就好。
三、機械手手臂動作要靈活
手臂的結(jié)構(gòu)要緊湊小巧,才能做手臂運動輕快、靈活。在運動臂上加裝滾動軸承或采用滾珠導(dǎo)軌也能使手臂運動輕快、平穩(wěn)。此外,對了懸臂式的機械手,還要考慮零件在手臂上布置,就是要計算手臂移動零件時的重量對回轉(zhuǎn)、升降、支撐中心的偏重力矩。偏重力矩對手臂運動很不利,偏重力矩過大,會引起手臂的振動,在升降時還會發(fā)生一種沉頭現(xiàn)象,還會影響運動的靈活性,嚴重時手臂與立柱會卡死。所以在設(shè)計手臂時要盡量使手臂重心通過回轉(zhuǎn)中心,或離回轉(zhuǎn)中心要盡量接近,以減少偏力矩。對于雙臂同時操作的機械手,則應(yīng)使兩臂的布置盡量對稱于中心,以達到平衡。
四、位置精度高
機械手要獲得較高的位置精度,除采用先進的控制方法外,在結(jié)構(gòu)上還注意以下幾個問題:
1.機械手的剛度、偏重力矩、慣性力及緩沖效果都直接影響手臂的位置精度。
2.加設(shè)定位裝置和行程檢測機構(gòu)。
3.合理選擇機械手的坐標(biāo)形式。直角坐標(biāo)式機械手的位置精度較高,其結(jié)構(gòu)和運動都比較簡單、誤差也小。而回轉(zhuǎn)運動產(chǎn)生的誤差是放大時的尺寸誤差,當(dāng)轉(zhuǎn)角位置一定時,手臂伸出越長,其誤差越大;關(guān)節(jié)式機械手因其結(jié)構(gòu)復(fù)雜,手端的定位由各部關(guān)節(jié)相互轉(zhuǎn)角來確定,其誤差是積累誤差,因而精度較差,其位置精度也更難保證。
五、通用性強,能適應(yīng)多種作業(yè);工藝性好,便于維修調(diào)整
以上這幾項要求,有時往往相互矛盾,剛性好、載重大,結(jié)構(gòu)往往粗大、導(dǎo)向桿也多,增加手臂自重;轉(zhuǎn)動慣量增加,沖擊力就大,位置精度就低。因此,在設(shè)計手臂時,須根據(jù)機械手抓取重量、自由度數(shù)、工作范圍、運動速度及機械手的整體布局和工作條件等各種因素綜合考慮,以達到動作準確、可靠、靈活、結(jié)構(gòu)緊湊、剛度大、自重小,從而保證一定的位置精度和適應(yīng)快速動作。此外,對于熱加工的機械手,還要考慮熱輻射,手臂要較長,以遠離熱源,并須裝有冷卻裝置。對于粉塵作業(yè)的機械手還要添裝防塵設(shè)施。
 724小時服務(wù)支持
724小時服務(wù)支持
 型號齊全可非標(biāo)定制
型號齊全可非標(biāo)定制
 機械手源頭生產(chǎn)廠家
機械手源頭生產(chǎn)廠家
 做工精密 壽命長
做工精密 壽命長