科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:www.637617.com
伺服機械手的運動學冗余自由度是指伺服機械手擁有比它的結尾所需求的自由度更多的自由度。運動學冗余自由度的伺服機械手具有比非冗余自由度的伺服機械手非常好的功用。例如,非冗余自由度的伺服機械手在外部環境中有障礙物時受到非常大的約束,運動學冗余自由度的伺服機械手就能極好的完成任務。因為奇異點的存在,非冗余自由度的伺服機械手的作業空間受到約束,運動學冗余自由度的伺服機械手就能極好的處理這類疑問。
冗余自由度的伺服機械手在運動操控中可以優化各種功用指標,如:約束關節視點,最小化伺服機械手關節角速度、角加速度、關節力矩、能量等。因而,具有運動學冗余自由度的伺服機械手得到了廣泛的運用,其中躲避障礙物即是一個非常重要的運用。
通常來說,伺服機械手的避障操控主要有兩種辦法。一種辦法是在高層進行途徑計劃,使伺服機械手結尾經過離線途徑計劃來避障礙物。這種辦法可以確保伺服機械手的全局優化,但它卻無法完成在線操控。另一種辦法是經過伺服機械手的操控器在線進行避障。對于在線避障的操控,很多專家都提出了自個的辦法。很多算法是基于偽逆矩陣法。伺服機械手的避障操控可以使伺服機械手在作業過程中避開障礙物,充分發揮冗余自由度的伺服機械手的優勝功用。

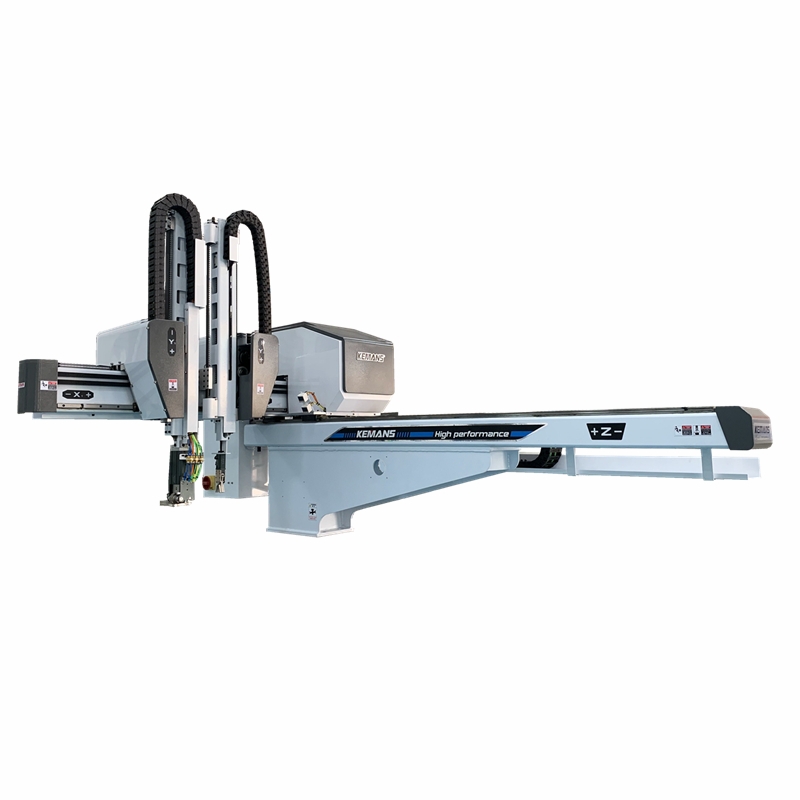
伺服機械手是在主動化出產過程中運用的一種具有抓取和移動工件功用的主動化設備,它是在機械化、主動化出產過程中發展起來的一種新型設備。伺服機械手是由高功用驅動,進口伺服電機,精細傳動設備和真空抽吸調配,電磁或氣動夾爪,等多元化的收回形式,為客戶供給每天24小時工作,安穩牢靠的設備,以到達縮短出產節拍,出產效率高,進步客戶在同行業中強壯的技術支持和競賽優勢。
常常被用在沖壓加工出產線中,有單工位沖壓伺服機械手與多工位沖壓伺服機械手之分。單臺單工位沖壓伺服機械手適合于較大型、片狀的沖壓出產場合。通常合作片材發料器運用。而單臺多工位沖壓伺服機械手則更適合于小型工件的沖壓以及需求多個沖壓工序的加工場合,通常合作主動送料機以及圈料進行出產。
伺服機械手選用單條軌跡,上配多套吸盤,軌跡進行左右上下運動,吸取商品,進行左右移動,只需將板料規整擺放在上料區上,即可進行長期的主動出產,只需員工守時的彌補板料即可; 設備選用規范直線滑軌,專用抱具,絲桿,伺服電機作為驅動,PLC配五顏六色觸摸屏操控,能恣意設置參數,適用面廣,對于不一樣原料的商品,可裝備不一樣的抓取東西:如真空吸盤、磁性吸盤、或機械夾頭等,能為您省去很多的人工開支,根絕工傷事故,產值高,質量安穩,是抱負的主動化設備。適用商品:金屬盤、碗同等類商品。
完。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長