科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:www.637617.com
1 使用要求分析
對于選型的人員首先要有物理運動學基礎,材料力學基礎,伺服驅動器使用和數控系統的應用經驗,伺服機械手,三軸機械手,五軸機械手,機械手但最主要是把用戶的問題和要求等了解清楚。對于簡單任務和有經驗的工程師通過電話和郵件就可以溝通好,而對復雜的任務要到現場雙方共同分析和制定任務描述,給出具體合理的要求。下面是所需要的主要信息:

五軸機械手的工作過程,手抓和負載的總重量,一個完整的工作周期是多少,可能分解成的子運動及對應的時間,運動和取抓過程中與其它設備的同步/握手要求,各個運動軸的有效運動長度及允許的最大運行速度及加減速度,五軸機械手工作周圍空間上的限制,使用環境有粉末,高溫,水和濕度等特殊防護要求,
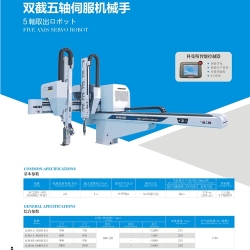
2 五軸機械手結構形式選擇
根據前面“使用要求分析”中獲得的信息資料來選擇五軸機械手的結構形式。原則上盡可能選擇龍門式直角坐標五軸機械手,但有時受工作空間限制必須選擇懸臂式等。在食品搬運和玻璃切割等項目中會產生大量粉末,傷害運動軸里面的導軌,此時最好采用吊掛式五軸機械手。有時根據負載及運動距離和空間限制必須選用掛臂式。根據五軸機械手的工作任務來確定負載的運動位置精度要求,要考慮減速時晃動產生的位置誤差。根據五軸機械手的工作任務及其工作空間上的限制來確定運動軸數量及各自運動行程。
3 規劃運動軌跡及運動速度
根據五軸機械手的工作任務和空間限制來規劃運動軌跡。盡可能減少運動距離,對工作周期要求嚴的應用要盡可能運用多軸同時運動來減少運動時間和降低運動速度。抓取負載后運動速度要低,空載返回原始點時要快。負載大時加速度和減速度要小,盡可能避免產生巨大的沖擊力。根據上面的原則給出各段運動的速度,加速度和減速度。各個運動段間盡可能平穩變速以保證工作周期,減少沖擊力和運行噪音。在運動速度分配時要充分考慮各個運動過程與其它設備間的同步協調時間,而且規劃的運動時間要比用戶要求的時間短些。
4 受力分析
根據速度分析得出各個軸的最大加速度和減速度。然后再計算出多軸同時運動時產生的合成最大減速度。選擇獨立運動的減速度和同時運動時合成減速度二者中大的減速度,根據這個最大的減速度計算出XYZ三個方向的最大沖擊力Fx, Fy和Fz及產生的最大扭曲力矩Mx, My和Mz。在計算不同軸扭曲力矩Mx, My和Mz時要考慮等效負載的重心位置,總重力和減速時產生的沖擊力。
根據Fx, Fy和Fz及產生的最大扭曲力矩Mx, My和Mz來選擇出各個運動軸的結構形式和型號。還要考慮各個運動軸間的連接方式,保證其強度,有足夠的抗沖擊力能力,使其能長期穩定高速高效工作。
5 變形分析
繞度形變僅在大跨度懸空方式下,而且受力很大的情況下才發生。其繞度形變量的計算方法見下面的公式。 但Z軸和X軸的安裝方式保證了本公司機器人沒有繞度形變發生或繞度形變極其微小可以忽略不計。
f = (F×L3)/(E×I×192)
f:撓度形變 (mm) f≤ 1 mm
F:負載壓力 (N)
L:導軌長度 (mm)
E:彈性模量(70,000N/mm2)
I:面積平方(mm4) 在很多任務中可以允許在運動中有一定量的變形,但在玻璃切割機等數控設備類的應用中是不允許產生變形的。為此我們要根據前面求出的最大力來查看各種型號運動軸的變形量曲線。必要時可以選擇加強型,付加加強板等,詳情請與沈陽百格機器人公司周文寶聯系。
6 選擇驅動電機
根據直線定位單元驅動軸的最高轉速來選擇驅動電機。當驅動軸的最高轉速低于600轉/分時通常選用步進電機,否則要選用交流伺服電機。但交流伺服電機的最高轉速不要超過3000轉/分,否則影響其壽命。當選用步進電機做驅動軸時,其負載的轉動慣量與步進電機的轉動慣量比要小于12,當選用伺服電機做驅動軸時,其負載的轉動慣量與伺服電機的轉動慣量比要小于8,否則影響其高動態特性。但轉動慣量比大于上面的數值時,要加德國扭卡特公司的精密行星減速機。在不超過驅動電機最高轉速限制情況下,要盡量選擇大減速比的減速機。為了保證高的動態特性,保證在約定的時間內完成任務,驅動電機的最大出力要比理論計算值至少高出85%。我們通常所選擇的驅動電機的最大出力要比理論計算值至少高出100%,而轉動慣量比要小于5。還要考慮所選擇的伺服電機能與德國扭卡特公司的精密行星減速機匹配,減速機要能安裝到驅動軸上,及電機的控制方式與數控系統相配合。有關驅動電機和減速機的詳細技術數據和使用注意事項請與沈陽百格機器人公司聯系。
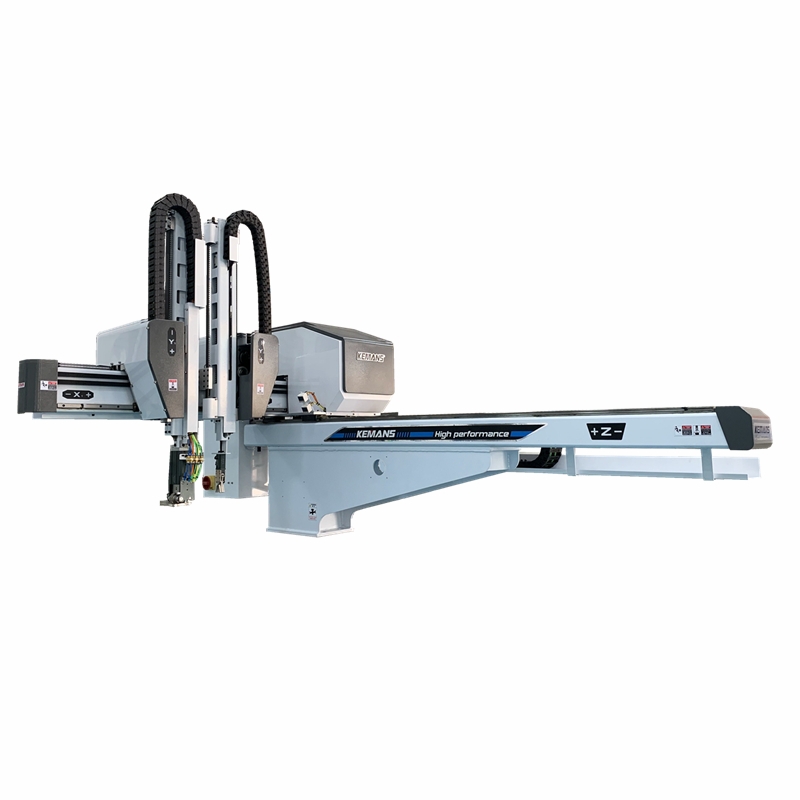
7 確定五軸機械手的結構及各個運動軸
根據上面6個方面的信息和數據就可以最終選定五軸機械手的結構形式及每個運動軸的具體型號和長度等,通常我們能從圖片庫中找出同樣結構的照片,這里的照片是指CAD圖或以往用戶機器人的照片。還要設計好各個軸間的連接板,不僅要考慮機械方面的裝配配合精度,材料的物理強度,連接螺絲桿的拉力等,更要考慮在主要受沖擊方向加大加強連接板,必要時增加連接板。主要螺絲桿和螺絲帽要加膠,以防長期振動后變松動。
五軸機械手在加速和減速時會產生強大的沖擊力,而且通常每天要工作24小時,所以五軸機械手必須被牢固地安裝在支架上。五軸機械手的支架要有足夠的抗沖擊力,要有地腳,以保證在長期高速高動態運動沖擊下,沒有任何晃動。此外在安裝時要保證運動軸間的平行度、平面度和垂直度。
8 連接板設計
連接板的方式非常重要,要由有多年實際經驗的師父來設計。連接板的方式及質量直接關系到所設計生產的五軸機械手能否長期高速高效穩定工作。為此要計算出每個運動軸的Fx, Fy和Fz及產生的最大扭曲力矩Mx, My和Mz。這里在計算Fx, Fy和Fz時,不時每個軸自己運動時產生的力,而是在整個五軸機械手高速運動時,使該軸產生的最大合成運動速度和加減速度值對應的Fx, Fy和Fz。而Mx, My和Mz的計算也要考慮等效重心位置與滑塊中心位置。在求出Fx, Fy和Fz及產生的最大扭曲力矩Mx, My和Mz后,所設計的連接方式至少要有3倍的余量。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長